Ethan Schaler, a robotics mechanical engineer at NASA’s Jet Propulsion Laboratory in Southern California, loves the idea of exploring new worlds. He also loves acronyms, based on his project called Sensing With Independent Micro-Swimmers (SWIM). SWIM was recently awarded $600,000 in Phase II funding from the NASA Innovative Advanced Concepts (NIAC) program, with the goal of proving the feasibility of the mission and 3D printing workable designs.
Then, if everything goes according to plan, NASA may start preparations to include the swarm in its future missions that will search for life on ocean worlds
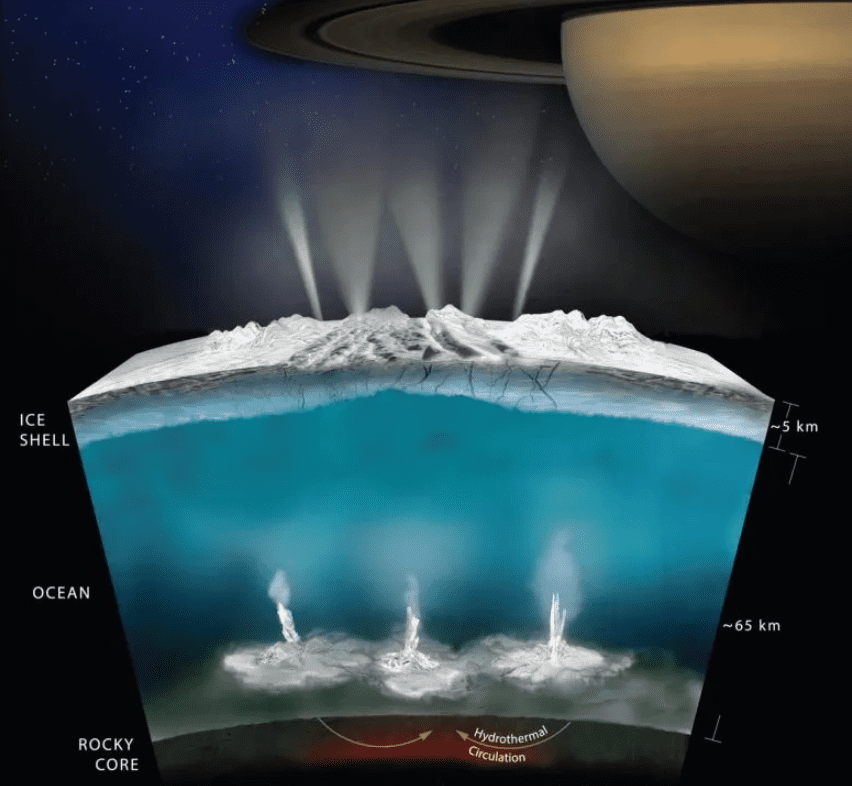
The next decades of space exploration in our solar system will focus on the so-called “Ocean Worlds” — ice-covered satellites like Europa or Enceladus that are thought to host liquid water beneath their frozen crust.
Decades ago, astronomers wouldn’t have given much thought to these worlds as a priority, but increasingly, recent research is showing that there’s more to them than meets the eye.
Despite not being planets (they’re satellites), the ocean worlds in our solar system are considered some of the likeliest places to host life. They may be very far away from the Sun, which is why their surface is frozen, but tidal friction ensures that beneath the surface, there’s enough heat for liquid water. Basically, tidal interactions caused by their giant host planets cause the interior of these satellites to flex, which generates enough heat to melt the ice and keep it liquid.
It’s more than just a hypothesis, researchers have actually observed signs of liquid water on these worlds — and where there’s liquid water, there could be life. But how do you look for it?
The prospect of a mission to a world like Europa is daunting in several ways. It would be by far the most complex mission NASA has undertaken, and not just because Europa is so much farther away from Earth. Unlike Mars, you can’t just land your rover on the surface and then have it explore. Sure, you can get valuable information from the surface of Europa, but the real prize is the water underneath the ice. This is where Schaler’s mini-robots come in.
The first innovation in this proposal is the shape and size of the robots: they’re much smaller and wedge-shaped, which means many of them could be equipped on a lander, which further increases the area you can explore and the chance of finding signs of life (should such signs exist).
“My idea is, where can we take miniaturized robotics and apply them in interesting new ways for exploring our solar system?” Schaler said. “With a swarm of small swimming robots, we are able to explore a much larger volume of ocean water and improve our measurements by having multiple robots collecting data in the same area.”
Each robot would have its own propulsion system, along with basic sensors for temperature, salinity, acidity, and pressure — as well as chemical sensors to look for biological markers. The robots would also have an ultrasound communications system, through which they could communicate with the surface lander, which would in turn communicate with NASA.
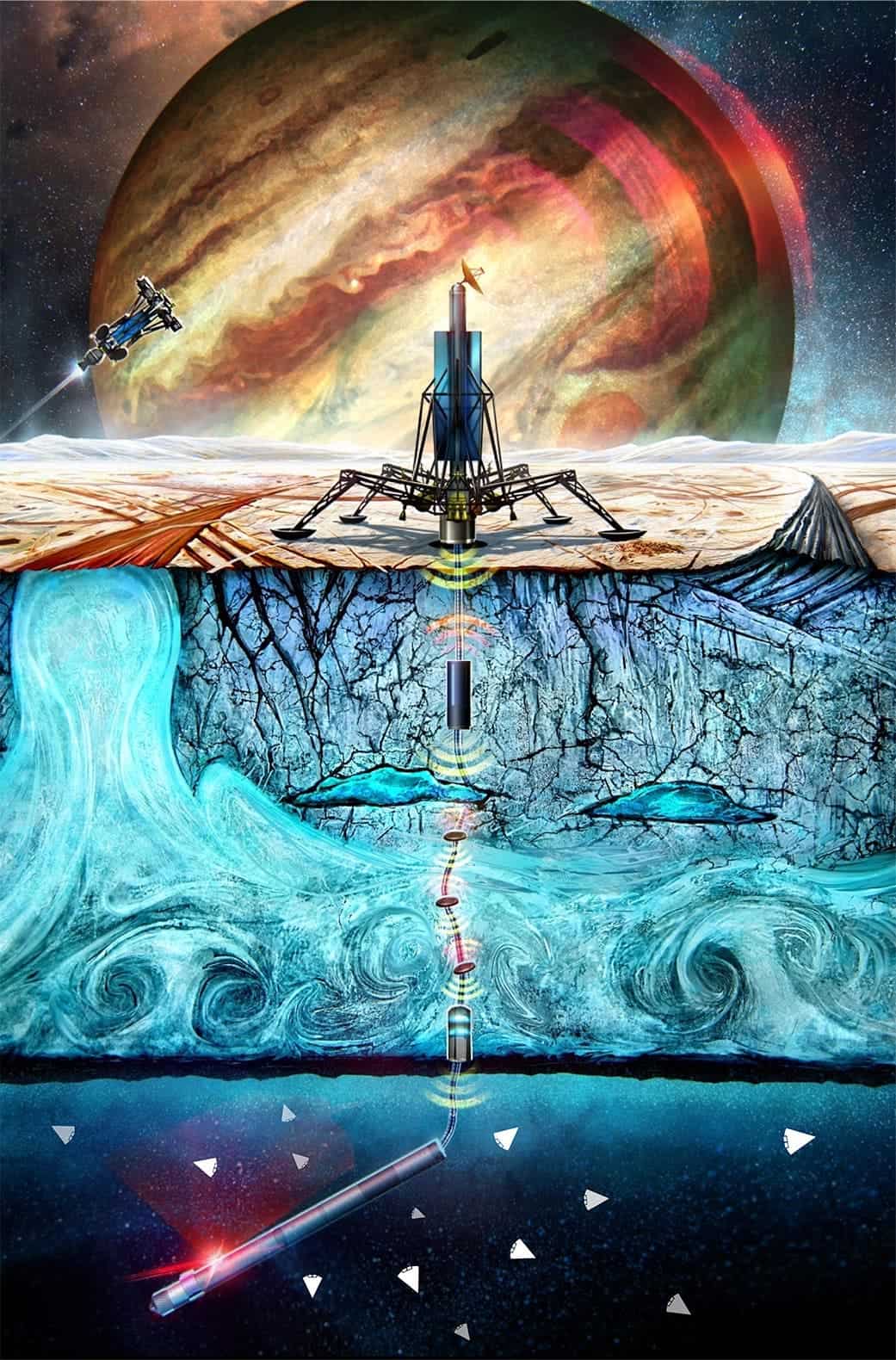
The robots, which would measure only a few centimeters long, would be deployed either individually or as a swarm from a single robot mothercraft. This flexibility of the swarm would enable NASA to explore multiple locations around the entry point, which is very useful. After all, there’s not much info at all regarding where your best odds of finding signs of life are. What if you send your robot somewhere and there’s something really cool and important closeby, but not quite there? Well, the robot swarm will be able to explore that and give you a wider view.
“What if, after all those years it took to get into an ocean, you come through the ice shell in the wrong place? What if there’s signs of life over there but not where you entered the ocean?” said SWIM team scientist Samuel Howell of JPL, who also works on Europa Clipper. “By bringing these swarms of robots with us, we’d be able to look ‘over there’ to explore much more of our environment than a single cryobot would allow.”
It’s a bit like how the Ingenuity helicopter helps explore Mars by offering a much broader view of what’s going on around the rover.
“The helicopter extends the reach of the rover, and the images it is sending back are context to help the rover understand how to explore its environment,” he said. “If instead of one helicopter you had a bunch, you would know a lot more about your environment. That’s the idea behind SWIM.”
Now, it’s time for Schaler to prove that this concept can work and produce a functional design that can be tested. If it works, we may soon send our robot swarms to another world looking for life.